")
")
")
")
")
")
")
")
机械式四轮转向系统的优点和组成原理
汽车助力转向系维修
10-28
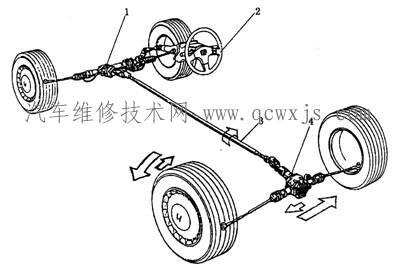
为了提高汽车转向特性和机动性,现在少数汽车采用了四轮转向系统(4WS)(four-wheel steering)。
什么是四轮转向系统呢?四轮转向系统的后轮与前轮一起参与转向,是一种提高车辆机动性和稳定性的关键技术。后轮与前轮同相位转向,可以减小车辆转向时的旋转运动,改善高速行驶的稳定性。使后轮与前轮逆相位转向,能够改善车辆中低速行驶的操纵性,提高快速转向性。
2005年推出的Jeep Hurricane概念车据说可以实现原地掉头
四轮转向的由来
四轮转向技术及解决了如下几种需求:
四轮转向系统的构成
四轮转向系统基本组成
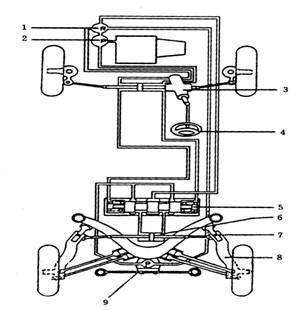
如图14. 23所示为丰田四轮转向系统的布置,该系统是电子控制四轮转向系统,是在机械式4WS的结构上增加了电子控制装置,前后轮都有齿轮机构,中间由连接轴连接。www.qcwxjs.com
该系统主要由车轮转速传感器、输出齿轮、连接轴、输人轴、后横拉杆、转向枢轴、伺服 电动机、4WS转换器、主电动机、转向角比传感器、扇形齿轮以及电子控制单元等组成。
1一车轮转速传感器(2—横拉杆;3—输出齿轮;4一方向盘;5—连接轴;6—输人轴; 7一后横拉杆;8—转向枢轴;9一伺服电动机;10—4WS转换器;11一主电动机; 12—转向角比传感器(13—扇形齿轮
转向时,转向盘的旋转传递到齿轮齿条转向器,由齿轮带动横拉杆左右运动,使前轮 转向。同时,输出齿轮向后输出动力,通过连接轴传给后轮轮齿机构。
1) 转向枢轴
后转向齿轮箱的转向枢轴是一个大轴承,如图14. 24所示,其外圈与扇形齿轮成为一体,围绕枢轴可左右转动(内圈与连杆突出的偏心轴相连接,连杆由4WS转换器的电动机带动绕自身轴线做正反转动,偏心轴在转向枢轴机构内可上下回转约55°。www.qcwxjs.com
转向时,通 过连接轴的输人使小齿轮向左或向右旋转时,旋转力就传递到扇形齿轮,再由转向枢轴通 过偏心轴使连杆向左右方向移动。连杆带动后转向臂拉杆和后转向节臂实现后轮的转向。 由于枢轴与偏心轴的运动,形成后轮的同向和逆向的转向。偏心轴的前端与枢轴左右旋转 中心重合时,即使转向枢轴左右转动,连杆也完全不动,后轮处于中立状态。随着偏心轴 前端位置与枢轴的旋转中心向下的偏离,枢轴左右转动时的连杆移动量就变大。偏心轴前 端位置在转向枢轴的上侧时为逆向转向,而下侧为同向转向。
图14. 24转向枢轴 (a)结构;(b)中心状态;(c)逆向状态((d)同向状态 1一扇形齿轮;2—连杆;3—转向枢轴外圈(4一转向枢轴内圈(5—偏心轴
2) 4WS转换器
4WS转换器部分的结构如图14. 25所示。转换器有主电动机、副电动机、带行星齿轮 的减速机构等组成。通常主电动机转动,副电动机就处于停止状态。副电动机的输出轴与 行星齿轮的中心齿轮相连,齿圈就是4WS转换器的输出轴。通常中心齿轮固定不动,而 与主电动机相连的行星齿轮旋转。因此,行星齿轮围绕着中心齿轮进行“公转”和“自 转”,以此带动4WS转换器的输出齿圈。主电动机不工作时,行星齿轮就变成空转齿轮, 并将副电动机旋转传递到齿圈,使连杆同相位方向旋转。
图14. 25 4WS转换器 1 一偏心轴;2—扇形齿轮;3—输入小齿轮;4一转向枢轴; 7一主电动机;8—连杆;9一转向角比例传感器(10—转向角比例传感器
2 .控制内容
转向电子控制单元ECU通过转向角比例传感器、车速传感器等输入信号,进行以下控制。
1)转向角比例控制
转向角比例控制就是后轮转角和转向盘转角成比例关系变化,在低速区是逆向,而在 高速区是同向对后轮进行操纵控制。 驾驶员通过4WS方式转换开关,可选择常规模式或运动模式。车速主要是由车速表 传感器提供,作为辅助信号是用ABS车速传感器中的一个前轮传感器输入信号。转向角 比例传感器是监测后转向齿轮箱内的连杆旋转角度,根据滑动阻力相应与旋转角的模拟电 压输入到转向电子控制单元ECU。而倒车时,则停止4WS的工作,便于驾驶员驾驶。www.qcwxjs.com
2)安全控制
转向角比例传感器异常时,通过副电动机驱动到同相位方向最大值时停止控制。若是 副电动机异常,则用主电机进行同样的控制。 转向电子控制单元ECU异常时,通过副电动机驱动到同相位方向最大值为止,以常 规模式按照车速进行转向角比例控制。 车速传感器异常时,通过主电动机对后轮进行同相位转动角比例控制。
四轮转向系统转向特性分析
1.低速时的转向特性
汽车低速转向时的行驶轨迹,如图14. 20所示。从图中可看到,低速转向时,各车轮 上几乎不产生向心力,4个车轮的前进方向的垂线在一点相交,车辆即以此交点为转向中 心进行转向。对于前轮转向的2WS车,其后轮不转向,转向中心大致在后轴的延长线上, 如图14. 20(a)所示。而4WS车在此时是后轮逆向转动,转向中心就比2WS车的超前并靠 近车体处,如图14.20(b)所示。在低速转向时,若前轮转向角度相同,4WS的车辆的转 向半径更小,内轮也更小,所以转向特性好。一般来说,对于汽车,若后轮逆向转动5C 则可减少最小转弯半径约0. 5m、内轮差约0. 1m。
图14. 20低速转向时的行驶轨迹
(a) 2WS 车;(b) 4WS 车
2. 高速时的转向特性
直行汽车的转向特性是由下列两个运动的合成,即车辆的质心点绕改变前进方向的转 向中心的“公转”和绕质心点的“自转”运动。
理想的高速转向的运动状态是尽可能使车身的向和前进方向一致,以防多余的“自转”运动。对于2WS车高速转向时车辆的运动状态,如图14.21所示,前轮转向时,前轮产生侧偏角,且产生旋转向心力使车体开始“自转”。
当车体出现偏向时,后轮也出现 侧偏角,且产生旋转向心力。4个车轮分担“自转”和“公转”的力,一边平衡一边转 向。由于车速越高,离心力越大,所以必须给前轮更大的侧偏角,使它产生更大的旋转向 心力。
若使后轮也产生与此相对应的侧偏角,车体就会产生更大的“自转”运动。但车速越高,车体的“自转”运动就越不稳定,容易弓丨起车辆的旋转或侧滑。
在4WS的汽车上通过对后轮的同向转向操纵,后轮侧偏角和前轮相同,它与前轮 的旋转向心力相平衡,从而抑制“自转”运动。这样就有可能得到车身方向与车辆前进 方向相一致的稳定转向状态,如图14. 22(b)所示(并且4WS汽车对于直线行驶时的路面 干扰,车身变化小,便于驾驶员修正方向盘,而2WS的汽车则变化较大,如图14.22(a) 所示。
图14.21 2WS汽车高速转向的车辆动态
图14.22高速转向时转向操纵的比较 (a)两轮转向分析;(b)四轮转向分析
四轮转向为什么没有普及
四轮转向可以很好地解决弯道减速问题,很容易实现所谓漂移,也可以降低侧方位停车的难度,但很好奇的是为什么没有普及?汽车四轮转向有何硬伤?
先说说这项技术自身的缺点。显然,要想实现四轮转向,我们就不得不在后轴上增加一整套转向机、转向拉杆,从前还需要有一根转向杆从方向盘传递到后轴,既占空间又增加重量。现在虽然方向盘的转角能通过电信号传递给后轴转向机,但是需要诸多传感器监控车辆状态。无论哪种方式都会增加车辆的复杂性,发生故障的概率也就更大。www.qcwxjs.com